Die Technik einer Achterbahn
Die Grundidee der Achterbahn, die damals mit einem normalen handelsüblichen Schlitten und einer durch die Winterzeit gegebene Eisbahn auf einer Holzkonstruktion in Russland begann, hat sich bis zur heutigen Zeit im großen Rahmen verändert.
Die Technik einer Achterbahn baut sich aus vielen Elementen auf, um ein höchstes Niveau der Sicherheit, trotz Maximalem Nervenkitzel zu bieten. Weiter Faktoren für die Komplexität der Technik einer Achterbahn sind die immer steigende Kapazität der Menschenbeförderung, die man mit einer Achterbahn bewältigen möchte, sowie die immer ausgefalleneren Fahrelemente, mit denen man die Menschen in die einzelnen Freizeitparks locken möchte.
Antriebstechniken
Es gibt verschiedene Antriebssysteme, um eine Achterbahn entweder auf einen Berg oder mit einem Katapultstart aus dem Stand in Bewegung zu setzen.
Kettenlift
Die einfachste und bekannteste Methode ist der Kettenantrieb. Bei dieser Antriebsart greift ein sogenannter „Chain Dog“ (ein Mitnehmhacken), welcher an dem Achterbahnzug befestigt ist, in eine Beförderungskette, welche durch einen normalen Elektromotor angetrieben wird und somit den Zug von unten nach oben befördert. Oben angekommen klingt sich dieser Mitnehmhacken automatisch aus.
Dieses Antriebssystem verwenden die meisten Achterbahnen, da es aufgrund der einfachen Technik sicher, kostengünstig und zuverlässig ist.
Katapultstart durch Seilwinde
Während das erste vorgestellten Antriebssystem von der Technik recht einfach zu verstehen ist, beschäftige ich mich nun mit den komplizierteren Antriebstechniken einer Achterbahn, wie den Hydraulik-Katapultantrieb und einen Antrieb durch so genannte „Lineare Induktionsmotoren“.
Der Hydraulik-Katapultantrieb mit Seilwinde, ist einer der effektivsten Antriebssysteme, wenn es darum geht, Höchstgeschwindigkeiten zu erreichen. Dieses System wird deshalb unter anderem bei den zwei schnellsten Achterbahnen der Welt namens „Formula Rossa“ und “Kingda Ka“ verwendet.
Auf einer Strecke befindet sich der Achterbahnzug, welcher auf die Vorbereitung des technischen Prozesses und die damit verbundene Realisierung des Katapultstarts warten muss. Katapultstart meint dabei, dass der Zug inklusive Mitfahrer ein Geschwindigkeitsantieg von 0 auf bis zu 200 Km/h erleben darf. Doch wie kann solch eine gewaltige Kraft enstehen, um einen vollbesetzten Achterbahnzug auf diese hohen Geschwindigkeiten zu katapultieren?
Es besteht eine hydraulische Antriebsmechanik, bei der ein Hydrauliköl mittels Pumpen aus einem drucklosen Tank in den gezeigten Kolbenspeicher befördert wird. Dieser Kolbenspeicher ist mit einem Stickstoffbehälter verbunden. Es wird deshalb Stickstoff verwendet, da Stickstoff sehr gut komprimiert, sowie hohe einen hohen Druck annehmen kann. Vor dem Katapulstart wird permanent das Öl vom Tank in den Kolbenspeicher gepumt, womit das Stickstoffvolumen gleichzeitig verkleinert wird und ein immer größer werdender Druck im Kolbenspeicher ensteht.
Hat der Kolbenspeicher seinen Maximaldruck erreicht, drücken 300 bar gepeicherter Druck vom Kolbenspeicher schlagartig in den Hydromotor, welcher durch diesen Druck auf eine hohe Drehzahl gelangt. Die mit dem Motor verbundene Seiltrommel versetzt ein an einem Stahlseil befestigten kleinen Wagen namens „Caddy“ in bewegung. Dort hackt sich der Zug ein und wird somit katapultartig nach vorne beschleunigt, bis sich das „Caddy“ nach unten absetzt und der Zug aus eigener Kraft den Anstieg bewältigen kann. Man kann sehen, dass das Seilsystem über mehre Fürhungsrollen geführt wird. Die Führungsrollen garantieren für eine permanente Vorspannung des kompletten Seilsystems. Durch den schnellen Anzug des Achterbahnzuges entsteht auf den Umlenkrollen schlagartig für kurze Zeit eine enorme Last. Diese wird durch Kolbenzylinder an den Führungsrollen ausgeglichen. Warum benutzt man eigentlich Kolbenspeicher und ein Antriebssystem mittels Ölpumptechnik? Würde man für diesen Katapulstart elektrische Maschienen verwenden, würde man mit diesen nur eine Kraftdichte von 0,5 bis 4 bar erreichen. Mit dem Kolbenspeicher und dem Ölsystem dahinter werden bis zu 22.500 Liter Öl pro Minute durch die Motoren gepumpt. Dadurch entsteht wie oben beschrieben eine Kraftdichte von bis zu 300 bar.
Da dieses System auch Schwächen aufweißt, sind an der Beschleunigungsstrecke Wirbelstrombremsen angebracht, welche falls der Zug den Anstieg durch zu wenig Antriebskraft nicht schafft, ein Rückrollen in den Achterbahnbahnhof und ein Kollidieren mit einem anderen Achterbahnzug verhindert.
Start durch Linearmotoren
Eine der modernsten und komplexesten Techniken für den Start einer Achterbahn ist der Start
durch so genannte Linearmotoren. Um die Funktionsweise dieser Antriebstechnik zu verstehen, sind mehrere Regeln der Physik näher zu erläutern.
Bevor man die Funktion eines Linearmotors verstehen kann, ist es wichtig den Aufbau eines normalen Synchron-sowie Asynchronmotors zu beschreiben. Wie entsteht eigentlich die Drehung bei einem Motor? „Von zentraler Bedeutung für die Funktion von Elektromotoren ist der physikalische Effekt, dass auf elektrische Ladungen, die sich in einem Magnetfeld bewegen, eine Kraft wirkt. Diese Kraft wird als Lorentzkraft bezeichnet“ [aus [3], S. 30].
Um die Entstehung eines Drehmoments einfach erklären zu können nutze ich das Beispiel einer Leiterschleife in einem Magnetfeld. „Die Leiterschleife besteht aus einem langen Hin- und Rückleiter sowie den Verbindungsstücken zwischen Hin und Rückleiter. Die Leiterschleife ist drehbar gelagert und befindet sich in einem Magnetfeld“ [aus [3], S. 32].
![Abbildung 5: Kraftwirkung auf eine stromdurchflossene Leiterschleife [aus [3], S.32]](http://www.freizeitparkinfos.de/wp-content/uploads/2017/03/Leiterschleife-im-Magnetfeld-300x264.jpg)
Damit ein Drehmoment entsteht, findet nun in der Leiterschleife ein Stromfluss statt. So entsteht durch den Hin- und Rückleiter eine unterschiedliche Stromrichtung, was wiederum heißt, dass zwei einander entgegengesetzte Komponenten der Lorentzkraft wirken. Dadurch, dass die Leiterschleife drehbar gelagert ist, entsteht durch die beiden Komponenten ein Drehmoment und die Leiterschleife führt eine Drehbewegung aus. Während die Leiterschleife diese Drehbewegung ausführt, wird gleichzeitig eine elektrische Spannung induziert. Diese entsteht, da sich das Magnetfeld durch die Drehbewegung ändert. Damit diese Grundidee auf einem richtigen Motor projiziert werden kann, fehlt noch ein ganz wichtiges Bauteil. Das Problem bei Abbildung 5 ist nämlich, dass nach Erreichen der waagrechten Position die Leiterschleife zum Stillstand kommen würde [vgl [3], S. 32-33].
Damit das nicht passiert und sich die Leiterschleife immer weiter dreht, muss sobald die Leiterschleife die waagerechte Position erreicht hat, der Stromfluss geändert werden. Dieses Umschalten übernimmt der Kommutator.

In Abbildung 6 sieht man nun den Kommutator, oben und unten jeweils mit zwei Kontaktbürsten verbunden. Diese Kontaktbürsten sorgen dafür, dass der Kommutator permanent mit Gleichstrom versorgt wird. Befindet sich nun die Leiterschleife in der waagerechten, sorgt der Kommutator dafür, dass sich die Stromrichtung in der Leiterschleife ändert und die Leiterschleife sich weiter dreht. Diese Umschaltung der Polarität der elektrischen Spannung verursacht der Kommutator dadurch, dass er aus zwei Hälften besteht und jede Hälfte mit einer anderen Leiterschleife verbunden und gegeneinander elektrisch isoliert ist. Die Größe des Drehmoments wird dabei durch die Stromstärke und den Leiterquerschnitt beeinflusst. Da Abbildung 6 nur eine vereinfachte Form der Technik eines solchen Gleichstrommotors darstellt, wird bei realen Gleichstrommotoren die Leiterschleife durch mehrlagige Ankerwicklungen aus Kupferdrähten ersetzt [vgl. [3, S. 38]].

Aufbau eines Linearmotors
Dieses beschriebene Prinzip der Leiterschleife in einem Magnetfeld lässt sich nun auf den Aufbau eines Linearmotor übertragen. Bevor man jedoch den Aufbau des sogenannten Synchronmotors (Linearmotor) versteht, gebe ich einen kurzen Einblick in die Funktion des Asynchronmotors.

Wie in Abbildung 8 zu erkennen ist, besteht der Asynchronmotor aus 3 Wicklungen, die um 120° gegeneinander versetzt angeordnet sind. Rechts ist der Läufer (Kurzschlusskäfig) mit den Leiterstäben erkennbar. Es entsteht ein sinusförmiger elektrischer Strom, der dafür sorgt, dass zwischen den Strömen eine Phasenverschiebung von 120° und daraus ein rotierendes magnetisches Feld entsteht. Daraus resultierend bewegt sich der Kurzschlusskäfig nach dem gleichen Prinzip wie der stromdurchflossene Leiter im Magnetfeld, da durch die kurzgeschlossenen Leiterstäbe eine Spannung induziert wird und somit ein Stromfluss in den Leiterstäben entsteht. Was einen Asynchronmotor aber nun ausmacht ist, dass der Kurzschlusskäfig dem magnetischen Feld nicht synchron, sondern mit einer geringeren Geschwindigkeit folgt (asynchron), da sonst keine Spannungsinduktion stattfinden würde [vgl. [3, S. 66-67]].
Der Synchronmotor bewegt sich nämlich synchron zu seinem Magnetfeld. Der Aufbau eins Synchronmotors ist gleich dem eines Assynchronmotors. Der Assynchronmotor hat jedoch immer einen Schlupf, also eine Abweichung, sodass die Läuferdrehzahl der Drehfeldrehzahl hinterhereilt, also asynchron läuft. Beim Synchronmotor ist die Läuferdrehzahl gleich der Drehfelddrehzahl und läuft also synchron.
Anhand der Drehmoment-Drehzahl-Kennlinien beider Motoren kann man sehr gut den Unterschied noch einmal veranschaulichen. Abbildung 9 zeigt, die Drehmoment-Drehzahl-Kennlinie eines Asynchronmotors. „Er hat nur ein Drehmoment, wenn seine Drehzahl von der synchronen Drehzahl abweicht. „Im Betriebsbereich ist das Drehmoment proportional zu dieser Abweichung“.
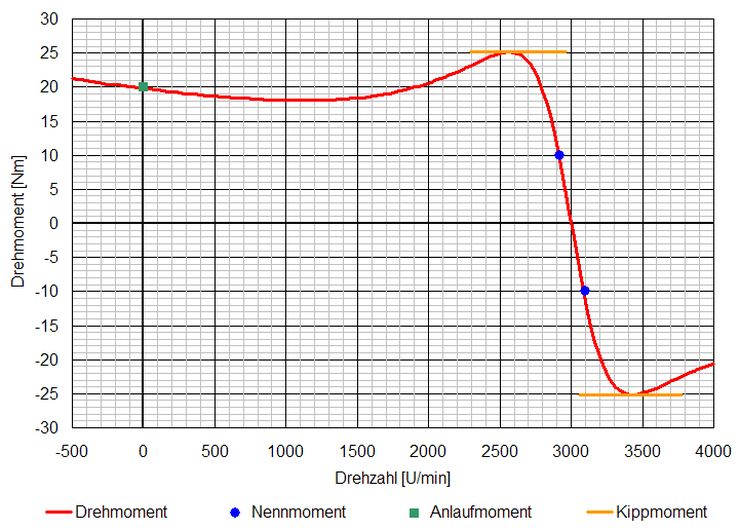
Dagegen ist die Drehmoment-Drehzahlkennlinie eines Synchronmotors nur eine senkrechte Strecke. Ein Drehmoment hat der Synchronmotor dann nicht mehr, wenn die Belastung über den Kippmoment geht. Als Kippmoment wird das maximale Drehmoment, welches die Motoren aufbringen können, bezeichnet. Ist dieser beim Synchronmotor erreicht, kann der Rotor dem Drehfeld nicht mehr folgen und er bleibt stehen. Wichtig ist auch, dass der Synchronmotor nicht von alleine anlaufen kann. Er braucht immer eine Art Anlaufhilfe, damit sich die Läuferdrehzahl mit der Drehfelddrehzahl synchronisieren kann. Dies geschieht in der Praxis zum Beispiel mit einem Frequenzumrichter.

Funktion eines Linearmotors
Die Funktion eines Linearmotors baut auf der Funktion des Synchronmotors auf. „Der Linearmotor kann gedanklich aus einem axial aufgeschnittenen Synchronmotor abgeleitet werden“ [aus [3, S.164]].

Er besteht aus einem Primär-und einem Sekundärteil. Das Sekundärteil besteht aus Permanentmagneten die abwechselnde Magnetisierungsrichtungen haben. Die Wicklungen bei dem Primärteil werden dagegen mit Drehstrom versetzt, was dafür sorgt, dass im Primärteil ein wanderndes Feld entsteht. Das hat die Folge, dass der Primärteil eine seitwärts gerichteter Bewegung ausführt [vgl. [3, S.164]].
Das gleiche Prinzip ist bei dem Linearantrieb einer Achterbahn zu finden. Bei einer Achterbahn gibt es jedoch nur den Unterschied, dass der Primärteil fest an der Schiene angebracht ist, und der Sekundärteil den „Läufer“ darstellt. So entsteht die Kraftwirkung auf den Achterbahnzug.
Literatur
[3] Weidauer Jens: Elektrische Antriebstechnik. 2. Auflage. Publics Publishing, 2011
Mehr zum Thema Achterbahnen, deren Technik und die Belastung auf den menschlichen Körper
- Die Welt der Freizeitparks und Achterbahnen
- Die Geschichte der Achterbahn
- Die Technik einer Achterbahn
- Sicherheitssysteme einer Achterbahn
- Die Physik einer Achterbahn
- Beschleunigungskräfte einer Achterbahnfahrt
- Die Rentabilität einer Achterbahn
- Interview mit einem Achterbahnhersteller
- Bau einer Modellachterbahn
- Achterbahnfahrt und Auswirkung auf den Menschen
- Belastbarkeit bei einer Achterbahnfahrt
- Das Gleichgewichtsorgan
- Adrenalin
- Herzfrequenz und Herzrasen
Keine Kommentare
Entschulidge, für diesen Artikel wurde die Kommentarfunktion deaktiviert.